|
Dynamics of SDOF System
|   |
|
Dynamics of SDOF System
| |
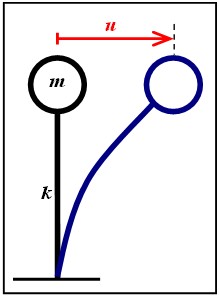
Consider a simple pendulum system as shown in the Figure below, which is commonly referred to as a single degree of freedom system (sdof). The general differential equation representing the response of a sdof to ground acceleration is the following:
|
|
(Equation-1) |
|
where: m: mass of the sdof system u: relative deformation of sdof with respect to the ground
c: coefficient of viscous damping fs: resisting force, which is a function of u
|
|
|
Equation-1 can be re-written as:
|
(Equation-2) |
|
Which can be further simplified to:
|
(Equation-3) |
where ![]() is the total acceleration of the sdof system (including ground acceleration), while
is the total acceleration of the sdof system (including ground acceleration), while ![]() and
and ![]() are the relative velocity and displacement respectively. The peak values of these quantities over the duration of the response to the earthquake excitation are the spectral acceleration (Sat), spectral velocity (Sv), and spectral displacement (Sd).
are the relative velocity and displacement respectively. The peak values of these quantities over the duration of the response to the earthquake excitation are the spectral acceleration (Sat), spectral velocity (Sv), and spectral displacement (Sd).
For a linear system, fs is equal to ku where k is the stiffness of the sdof:
![]()
Where ω is the the undamped natural frequency of such a system computed as:
This allows the reduction of Equation 1 to the following:
|
|
(Equation-4) |
where ζ is the ratio of the damping coefficient c to the critical damping coefficient ccr:
![]()
![]()
In addition to the above, the following forces are defined:
![]() , and
, and
![]()
And since ![]() , this lead to:
, this lead to: ![]()
Hence, Sfa can be used as a measure of the peak hysteretic + damping forces in the system.